Динамическая манипуляция в руке мягким роботом: SWIFT
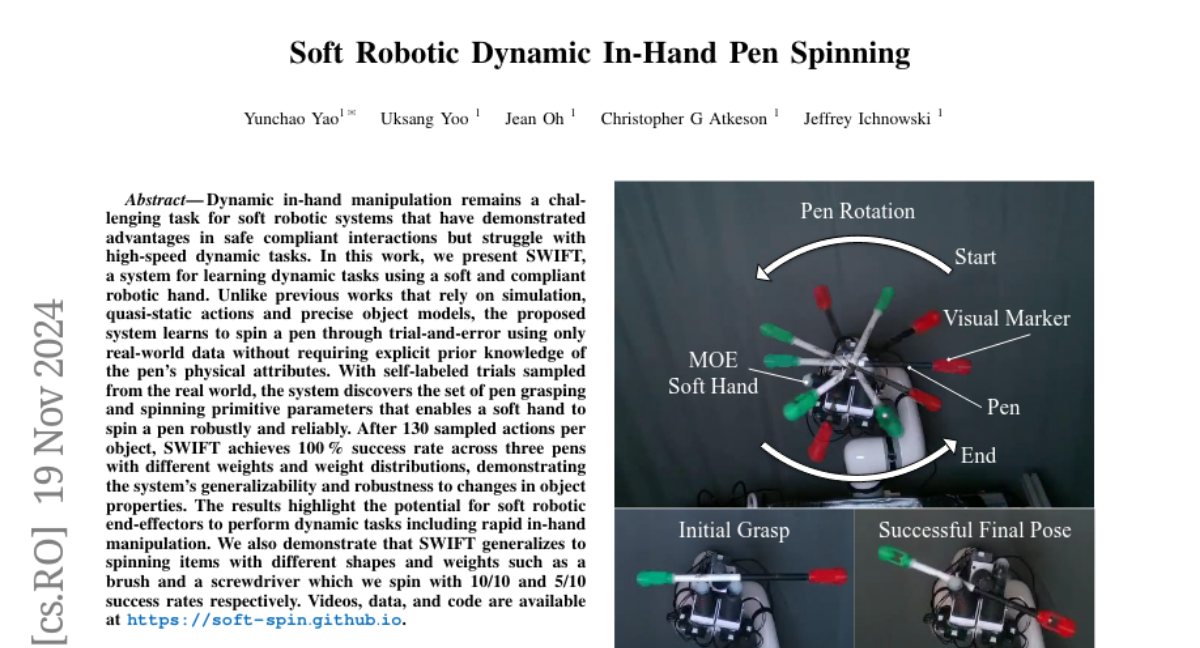
Динамическая манипуляция в руке остается сложной задачей для мягких робототехнических систем, которые показали преимущества в безопасных и податливых взаимодействиях, но испытывают трудности с высокоскоростными динамическими задачами. В данной работе мы представляем SWIFT, систему для обучения динамическим задачам с использованием мягкой и податливой роботизированной руки. В отличие от предыдущих работ, которые полагались на симуляцию, квазистатические действия и точные модели объектов, предлагаемая система учится вращать ручку методом проб и ошибок, используя только реальные данные без необходимости явного знания физических характеристик ручки. С помощью самопомеченных испытаний, отобранных из реального мира, система определяет набор параметров захвата и вращения ручки, которые позволяют мягкой руке вращать ручку надежно и эффективно. После 130 отобранных действий на объект, SWIFT достигает 100% успеха для трех ручек с разным весом и распределением веса, демонстрируя способность системы к обобщению и устойчивость к изменениям свойств объекта. Результаты подчеркивают потенциал мягких робототехнических эффекторов для выполнения динамических задач, включая быструю манипуляцию в руке. Мы также демонстрируем, что SWIFT может обобщать на вращение предметов различной формы и веса, таких как кисть и отвертка, с успехом в 10/10 и 5/10 соответственно. Видео, данные и код доступны по адресу https://soft-spin.github.io.