Динамическая манипуляция в руке мягким роботом: SWIFT
В мире робототехники, где точность и скорость движения являются ключевыми параметрами, мягкие роботизированные системы предлагают уникальные преимущества благодаря своей способности к безопасным и гибким взаимодействиям. Однако, несмотря на эти преимущества, выполнение динамических задач, требующих высокой скорости, остается для них сложным. В этой статье мы рассмотрим систему SWIFT (Soft-hand With In-hand Fast re-orienTation), которая представляет собой инновационный подход к обучению мягких роботизированных рук выполнению динамических задач, таких как вращение ручки.
Манипуляция объектами в руке — это не только интересная задача для робототехники, но и критически важная способность для выполнения множества повседневных задач. Мягкие роботизированные манипуляторы, благодаря своей податливости, могут безопасно взаимодействовать с окружающей средой и устойчивы к внешним воздействиям, но они сталкиваются с трудностями при выполнении быстрых динамических движений. До недавнего времени исследования в области мягких роботизированных систем фокусировались в основном на медленных квазистатических задачах, таких как захват и медленное переориентирование объектов.
Однако, как показывает практика, человеческие руки способны эффективно использовать динамику объектов для быстрого переориентирования и захвата различных инструментов. В качестве примера можно привести вращение ручки, которое требует не только точности, но и скорости, а также понимания динамических свойств объекта. Именно это вдохновило нас на создание SWIFT — системы, которая учится динамически манипулировать объектами в реальном мире без необходимости знания их точных физических характеристик.
Проблема и подход
Проблема
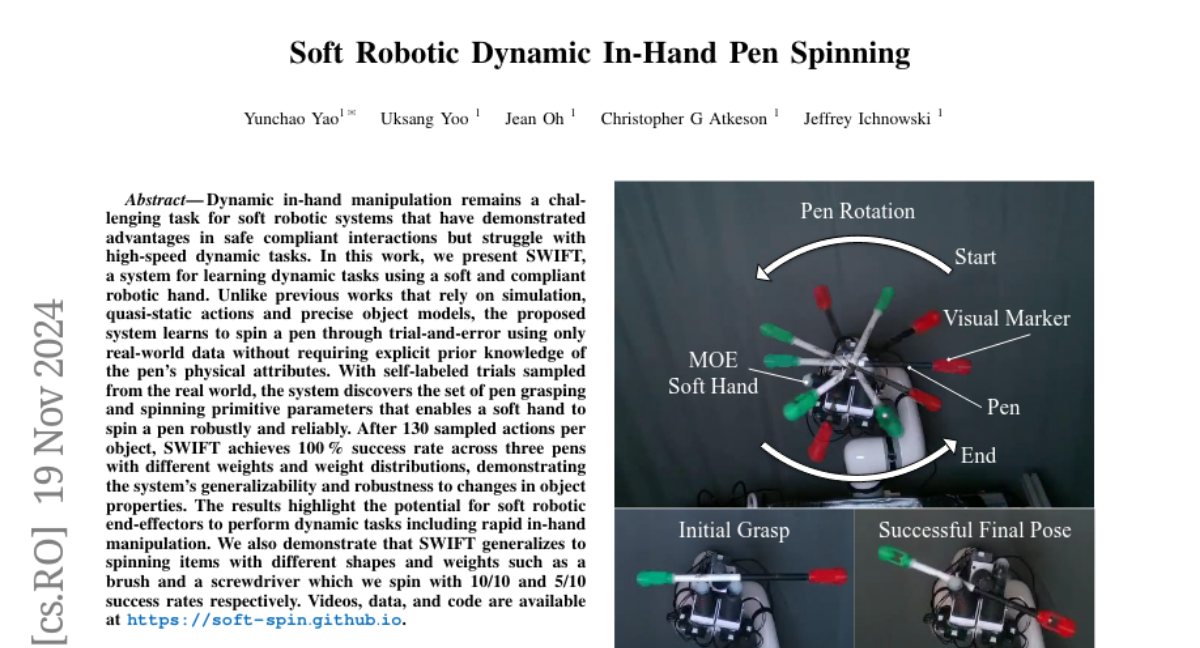
Основная задача SWIFT — научить мягкую роботизированную руку выполнять высокоскоростное вращение цилиндрического объекта, например, ручки, в руке. Конкретно, мы хотим, чтобы рука выполняла трюк "Thumbaround", где ручка толкается средним пальцем, вращается вокруг большого пальца и затем ловится указательным пальцем.
Подход
SWIFT использует мягкую роботизированную руку, состоящую из трех мягких пальцев, каждый из которых управляется двумя сервоприводами, контролирующими четыре тенденции. Эти пальцы могут сгибаться в перпендикулярных плоскостях, что позволяет руке достигать любой точки в полусферическом рабочем пространстве. Рука прикреплена к 6-осевому роботизированному манипулятору, который обеспечивает позиционирование руки для повторяемых захватов, но не участвует в самом процессе высокоскоростной манипуляции.
Для обучения SWIFT использует только данные из реального мира, без необходимости знания точных параметров объекта, таких как его вес или распределение массы. Вместо этого система опирается на методы проб и ошибок, используя эволюционные стратегии для оптимизации параметров захвата и вращения.
Методы
Мягкая рука
Для выполнения задачи мы разработали мягкую роботизированную руку на основе мультифингерного омнидиррекционного эффектора (MOE). Каждый палец этой руки управляется двумя сервоприводами, которые тянут тенденции, позволяя пальцам сгибаться в двух перпендикулярных направлениях. Это обеспечивает большую гибкость и возможность достигать различных точек в пространстве.
Настройка и процедура сброса
Перед каждой попыткой вращения ручки, она помещается в фиксированный слот на столе, что обеспечивает повторяемость захвата. Затем роботизированный манипулятор перемещает руку в положение, близкое к центру ручки, где пальцы закрываются, захватывая ручку. После этого манипулятор перемещает руку в предустановленное положение и ориентацию для выполнения вращения.
Параметризация действий вращения ручки
Мы параметризовали процесс вращения ручки через три основных действия: захват, вращение и ловля. Вместо оптимизации всех степеней свободы системы, мы сократили набор параметров до следующих:
- Цели сервоприводов: Угол, на который каждый сервопривод должен повернуться для вращения ручки, что дает нам 6 параметров.
- Время задержки: Время между окончанием вращения и началом ловли ручки, что позволяет пальцу m1 (средний палец) не блокировать вращение.
- Место захвата: Параметр, контролирующий смещение от центра ручки при захвате.
Оценка состояния и оптимизация
SWIFT использует RGB-D камеру для наблюдения за состоянием ручки. Система применяет метод Хафа для обнаружения маркеров на ручке, затем использует сегментацию для создания плотного облака точек, представляющего ручку. Применяется анализ главных компонент (PCA) для определения ориентации ручки в пространстве. На основе этих данных вычисляется объективная функция, включающая награду за вращение и штраф за падение ручки.
Самостоятельная оптимизация параметров
Для оптимизации параметров действий SWIFT использует стратегию адаптации ковариационной матрицы эволюционной стратегии (CMA-ES). Эта стратегия позволяет эффективно исследовать пространство параметров и находить локально оптимальные решения для успешного вращения ручки.
Оценка
Настройка эксперимента
Эксперименты проводились с тремя различными ручками, отличающимися по весу и распределению массы, чтобы оценить устойчивость SWIFT к изменениям в физических свойствах объектов. Также были проведены тесты с другими предметами, такими как кисть и отвертка, для демонстрации обобщаемости системы.
Результаты
После 130 проб на каждый объект, SWIFT достигла 100% успеха в вращении ручек с различными характеристиками, демонстрируя высокую адаптивность и надежность. Система также показала способность обобщать навыки на другие объекты, успешно вращая кисть в 10 из 10 попыток и отвертку в 5 из 10.
Заключение
SWIFT представляет собой значительный шаг вперед в области динамической манипуляции мягкими роботами. Система доказала свою способность учиться и выполнять сложные динамические задачи без предварительного знания физических свойств объектов, что открывает новые возможности для применения мягких роботизированных систем в различных областях, от промышленного производства до медицины и бытовых задач. В будущем планируется расширение возможностей SWIFT для работы с объектами различных форм и размеров, а также интеграция дополнительных сенсорных данных для улучшения точности и эффективности манипуляций.