GaussianProperty: Интеграция физических свойств в 3D Гауссианы с помощью LMM
В последние годы наблюдается значительный прогресс в области компьютерного зрения и графики, особенно в контексте интеграции физических свойств в 3D модели. Одним из новейших подходов к этой задаче является метод GaussianProperty, который предлагает инновационный способ оценки физических свойств объектов на основе визуальных данных. В этой статье мы подробно рассмотрим основные концепции, методы и приложения, связанные с GaussianProperty, а также его влияние на такие области, как динамическое моделирование и робототехника.
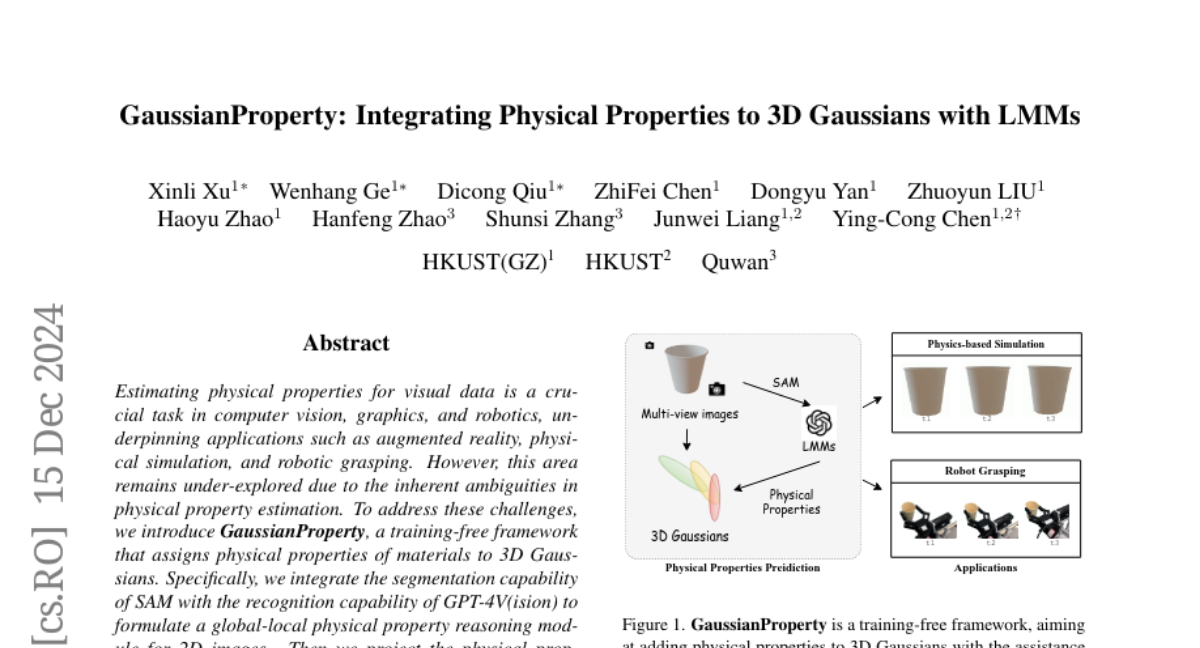
Оценка физических свойств объектов из визуальных данных является критически важной задачей в таких областях, как дополненная реальность (AR), робототехника и физическое моделирование. Однако эта задача остается недостаточно исследованной из-за существующих амбигуитетов в оценке физических свойств. GaussianProperty предлагает решение, которое позволяет интегрировать физические свойства в 3D модели с использованием больших мультимодальных моделей (LMM), таких как GPT-4V и SAM (Segment Anything Model).
Проблема
Основная проблема, с которой сталкиваются исследователи, заключается в том, что физические свойства объектов, такие как плотность, упругость и коэффициент Пуассона, не всегда могут быть непосредственно наблюдаемыми из визуальных данных. Это создает сложности в создании надежных алгоритмов для автоматизированной оценки этих свойств.
Решение
Метод GaussianProperty предлагает безобучающуюся рамочную структуру, которая позволяет назначать физические свойства материалам, представленным в виде 3D Гауссиан. В частности, метод использует возможности сегментации SAM для разбивки изображений на компоненты и GPT-4V для оценки физических свойств на основе этих компонентов.
Методология
1. Сегментация объектов
Первым шагом в методе GaussianProperty является сегментация объектов на изображениях. Для этого используется SAM, который позволяет выделять области объектов с высокой точностью. Сегментация осуществляется на различных уровнях, что позволяет получить как общую, так и детализированную информацию о каждом компоненте объекта.
2. Оценка физических свойств
После сегментации объектов, следующий шаг заключается в оценке физических свойств. Здесь на помощь приходит GPT-4V, который использует как глобальные, так и локальные данные для более точной оценки свойств. Важно отметить, что модель обучена на большом количестве данных, что позволяет ей хорошо справляться с задачей оценки свойств на основе визуальных подсказок.
3. Проекция на 3D Гауссианы
Полученные физические свойства затем проецируются на 3D Гауссианы с использованием стратегии голосования. Это позволяет избежать ошибок, которые могут возникнуть при оценке свойств на основе одного изображения. Процесс проекции включает в себя использование многовидовой реконструкции, что обеспечивает более точное представление о физических свойствах объекта.
Применения
1. Физическое моделирование
Одним из основных применений GaussianProperty является физическое моделирование. Метод позволяет создавать реалистичные динамические симуляции, используя метод Material Point Method (MPM). Это позволяет моделировать взаимодействия между объектами и их физическими свойствами, что является важным для различных приложений, включая игры и научные симуляции.
2. Робототехника
В области робототехники GaussianProperty используется для улучшения алгоритмов захвата. На основе оцененных физических свойств, такие как плотность и коэффициент трения, разрабатываются стратегии предсказания силы захвата. Это позволяет роботам безопасно поднимать и манипулировать объектами, минимизируя риск повреждений.
Эксперименты и результаты
Для проверки эффективности метода проведены обширные эксперименты, включая сегментацию материалов, динамическое моделирование и робототехнические захваты. Результаты показали, что GaussianProperty значительно превосходит существующие методы по точности и надежности.
1. Сегментация материалов
В экспериментах по сегментации материалов метод GaussianProperty продемонстрировал более высокие показатели точности по сравнению с другими подходами, такими как NeRF2Physics. Использование сегментации на уровне частей позволило достичь более точных результатов.
2. Динамическое моделирование
При использовании MPM для динамического моделирования, GaussianProperty обеспечил реалистичное взаимодействие между объектами, что подтверждает его эффективность в задачах физического моделирования.
3. Робототехнические захваты
В робототехнических экспериментах метод показал 100% успешность при захвате объектов, что значительно выше, чем у других методов, использующих фиксированные силы захвата. Это демонстрирует способность GaussianProperty адаптироваться к различным материалам и условиям.
Заключение
Метод GaussianProperty представляет собой значительный шаг вперед в области оценки физических свойств объектов на основе визуальных данных. Используя возможности больших мультимодальных моделей и сегментации, он позволяет эффективно интегрировать физические свойства в 3D модели. Это открывает новые горизонты для применения в таких областях, как физическое моделирование и робототехника, и подчеркивает важность точной оценки физических свойств для успешного выполнения задач в реальном мире.
GaussianProperty не только решает существующие проблемы в оценке физических свойств, но и создает новые возможности для дальнейших исследований и разработок в области компьютерного зрения и робототехники.