Код как Монитор: Осознание Ограничений в Визуальном Программировании для Реактивного и Проактивного Обнаружения Ошибок Роботов
С развитием робототехники и увеличением ожиданий по поводу их способности выполнять сложные задачи в динамичных и сложных средах, автоматическое обнаружение и предотвращение ошибок становятся критически важными. Ошибки могут возникать в результате различных факторов, включая непредвиденные изменения в окружении или ошибки в выполнении задач. В этой статье мы рассмотрим новый подход, предложенный в работе "Код как Монитор" (Code-as-Monitor, CaM), который сочетает в себе реактивное и проактивное обнаружение ошибок в роботах, используя визуально-языковые модели (VLM) для мониторинга и управления процессами в реальном времени.
Понятие об обнаружении ошибок
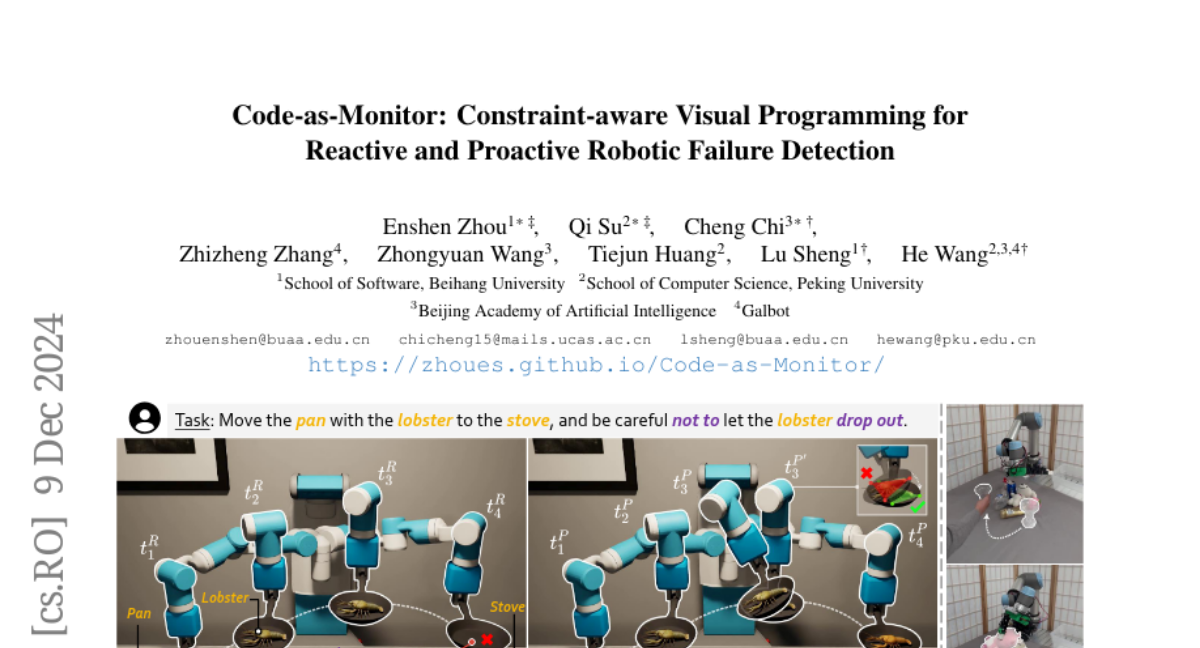
Обнаружение ошибок в роботах можно разделить на два основных типа: реактивное и проактивное. Реактивное обнаружение ошибок происходит после того, как ошибка уже произошла, например, когда робот осознает, что предмет упал. В отличие от этого, проактивное обнаружение ошибок включает в себя предотвращение ошибок до их возникновения, например, когда робот определяет, что наклон сковороды может привести к падению предмета.
Оба типа обнаружения ошибок становятся особенно сложными в открытых сценариях, где ошибки не предопределены. В этом контексте CaM предлагает объединенный подход, который использует элементы пространственно-временных ограничений для мониторинга и управления.
Архитектура CaM
CaM состоит из трех ключевых модулей: Генератора Ограничений, Рисователя и Монитора. Каждый из этих модулей играет важную роль в процессе обнаружения и предотвращения ошибок.
-
Генератор Ограничений: Этот модуль отвечает за генерацию подцелей и соответствующих текстовых ограничений на основе многовидовых наблюдений. Он использует языковую модель для интерпретации глобальных инструкций и определения конкретных ограничений, которые должны быть соблюдены во время выполнения подцелей.
-
Рисователь: Модуль Рисователя преобразует текстовые ограничения в визуальные элементы, которые представляют собой абстракции сущностей или их частей в виде компактных геометрических элементов (точек, линий, поверхностей). Это упрощает мониторинг выполнения задач, так как позволяет отслеживать динамику этих элементов.
-
Монитор: Этот модуль генерирует код мониторинга на основе визуальных подсказок и аннотированных наблюдений. С помощью этого кода происходит проверка выполнения ограничений в реальном времени. Если ограничение нарушается, система может немедленно среагировать, останавливая выполнение задачи и инициируя повторное планирование.
Элементы Ограничений
Для повышения точности и эффективности мониторинга CaM вводит концепцию элементов ограничений. Эти элементы представляют собой абстракции, которые упрощают отслеживание ограничений, уменьшая количество визуальных деталей, которые необходимо учитывать. Например, в случае с наклоненной сковородой, элементом ограничения может быть угол наклона, который необходимо отслеживать, чтобы избежать падения предмета.
Элементы ограничений могут быть использованы для упрощения визуального программирования, так как они служат визуальными подсказками для генерации кода мониторинга. Это позволяет системе более эффективно и точно выполнять задачи, даже в условиях динамично меняющегося окружения.
Реактивное и Проактивное Обнаружение Ошибок
Реактивное Обнаружение Ошибок
Реактивное обнаружение ошибок в CaM осуществляется через выполнение мониторингового кода, который проверяет состояние элементов ограничений в реальном времени. Если система обнаруживает, что какое-либо ограничение нарушено, она может немедленно остановить выполнение текущей задачи и предложить новое решение.
Проактивное Обнаружение Ошибок
Проактивное обнаружение ошибок включает в себя использование предсказательных моделей для оценки потенциальных причин ошибок до их возникновения. Например, если система обнаруживает, что углы наклона сковороды превышают допустимые значения, она может предпринять действия для корректировки этого состояния до того, как произойдет ошибка.
CaM объединяет оба подхода, обеспечивая более надежное и эффективное управление задачами в реальном времени. Это особенно важно для роботов, работающих в сложных и динамичных средах, где ошибки могут привести к серьезным последствиям.
Эксперименты и Результаты
В рамках исследования CaM были проведены обширные эксперименты в трех различных симуляторах (CLIPort, OmniGibson и RLBench) и в реальных условиях. Результаты показали, что CaM значительно превосходит существующие методы по показателям успешности и времени выполнения задач.
-
Успехи в Симуляторах: В симуляторах CaM продемонстрировал на 28.7% более высокий уровень успешности и на 31.8% сокращение времени выполнения по сравнению с базовыми методами.
-
Реальные Условия: В реальных условиях CaM также показал высокую эффективность, успешно адаптируясь к изменениям в окружении и обеспечивая надежное выполнение задач.
Заключение
Предложенный подход "Код как Монитор" представляет собой значительный шаг вперед в области обнаружения и предотвращения ошибок в робототехнике. Используя элементы пространственно-временных ограничений и визуально-языковые модели, CaM обеспечивает эффективное и точное управление задачами в реальном времени, что делает его перспективным инструментом для дальнейших исследований и разработок в области робототехники.
С учетом всех преимуществ, которые предоставляет CaM, можно ожидать, что в будущем он будет интегрирован в более широкие системы робототехники, что позволит роботам работать более эффективно и безопасно в сложных условиях.