WildLMa: Долгосрочное локоманипуляционное обучение в реальных условиях
В последние годы робототехника достигла значительных успехов в области мобильной манипуляции, что позволяет роботам выполнять сложные задачи в реальных условиях. Однако, несмотря на эти достижения, существует ряд проблем, которые необходимо решить для полноценного внедрения роботов в повседневную жизнь. Одна из ключевых проблем — это способность робота выполнять задачи, требующие долгосрочного планирования и адаптации к различным условиям окружающей среды. В этой статье мы рассмотрим WildLMa — инновационную систему, разработанную для решения этих задач.
Что такое WildLMa?
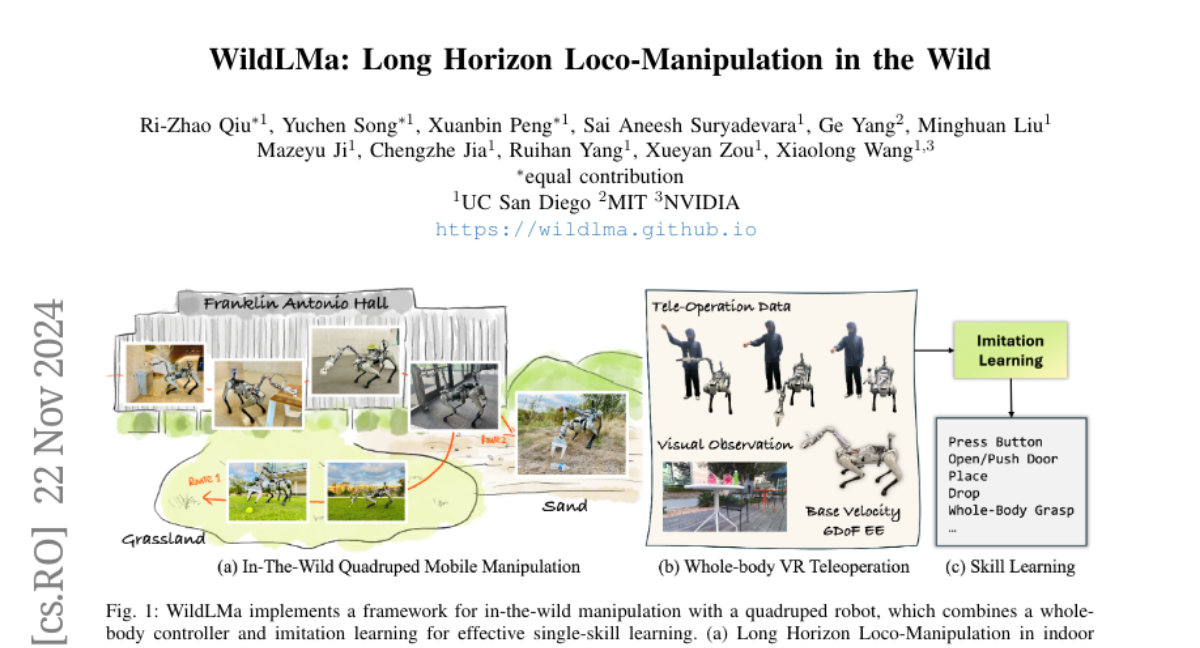
WildLMa (Wild Long-term Loco-Manipulation) — это комплексная система, разработанная для мобильной манипуляции в реальных условиях. Она включает в себя три основных компонента:
-
Адаптация низкоуровневого контроллера для телеоперации с использованием VR — позволяет оператору управлять роботом, используя виртуальную реальность, что значительно расширяет возможности робота по взаимодействию с окружающим миром.
-
WildLMa-Skill — библиотека визуомоторных навыков, которые робот может изучать через имитационное обучение или аналитические методы. Эти навыки обобщаются на различные объекты и условия.
-
WildLMa-Planner — интерфейс, который позволяет планировщикам, основанным на LLM (Large Language Models), координировать навыки для выполнения долгосрочных задач.
Технические аспекты WildLMa
Адаптация контроллера для телеоперации
Для эффективной телеоперации используется предварительно обученный низкоуровневый контроллер, который позволяет координировать движения тела и манипулятора робота. Это достигается через:
- VR-телеоперация: Оператор использует VR-устройства для управления роботом, что снижает разрыв между наблюдениями эксперта и агента.
- Координация движений: Контроллер автоматически управляет поворотами базы робота, координируя их с движениями манипулятора, что позволяет достигать объектов в различных положениях.
WildLMa-Skill
Этот модуль включает:
- Имитационное обучение: Робот обучается на демонстрациях, выполненных человеком, используя CLIP для улучшения обобщаемости навыков на невиданные объекты.
- Аналитическое планирование: Для базовых навыков, таких как навигация, используются аналитические методы планирования.
WildLMa-Planner
WildLMa-Planner обеспечивает:
- Иерархическое планирование: Задачи разбиваются на более мелкие подзадачи, которые затем выполняются с использованием предварительно изученных навыков.
- Интерфейс с LLM: Планировщик использует LLM для интерпретации и выполнения задач на основе естественного языка.
Эксперименты и результаты
WildLMa была протестирована на различных задачах, включая сбор мусора, реорганизацию полок и манипуляцию с артикулированными объектами. Эксперименты показали:
- Превосходство над базовыми методами: WildLMa превзошла существующие методы имитационного обучения и RL по показателям успеха в выполнении задач.
- Эффективность в долгосрочных задачах: Благодаря модульному подходу и использованию LLM, WildLMa способна выполнять сложные задачи с длительным горизонтом планирования.
- Улучшение обобщаемости: Использование CLIP и кросс-аттеншена позволило значительно улучшить обобщаемость навыков на новые объекты и условия.
Заключение
WildLMa представляет собой значительный шаг вперед в области мобильной манипуляции роботов. Ее способность адаптироваться к различным условиям окружающей среды, учиться на демонстрациях и выполнять долгосрочные задачи делает ее перспективной для реального применения в домашних и рабочих условиях. Это открытие новых возможностей для исследований в области робототехники, направленных на создание более автономных и адаптивных роботов.